

Créé en 2019 par l’INRAE (Institut National de la recherche agronomique), en partenariat avec le CNRS, le réseau Centipède est un réseau collaboratif de bases GNSS ouvertes et disponibles gratuitement pour toute personne se trouvant dans la zone de couverture. Le réseau est étendu par des instituts publics, des particuliers, des acteurs privés comme les agriculteurs ou d’autres partenaires publics.
L’objectif du projet est d’offrir une couverture complète du territoire métropolitain. Il est soutenu financièrement par l’INRAE et a bénéficié dès son démarrage en 2019 de moyens mutualisés entre des instituts de recherche, des organismes publics, des agriculteurs et des entreprises privées. La carte ci-dessous présente l’étendue actuelle du réseau :

Rentrer les paramètres de connexion suivants :
Limite de connexion: un matériel/ntrip client par IP
Real Time Kinematic : La Cinématique temps réel est une technique de positionnement par satellite basée sur l’utilisation de mesures de la phase des ondes porteuses des signaux émis par les systèmes GPS, GLONASS ou Galileo
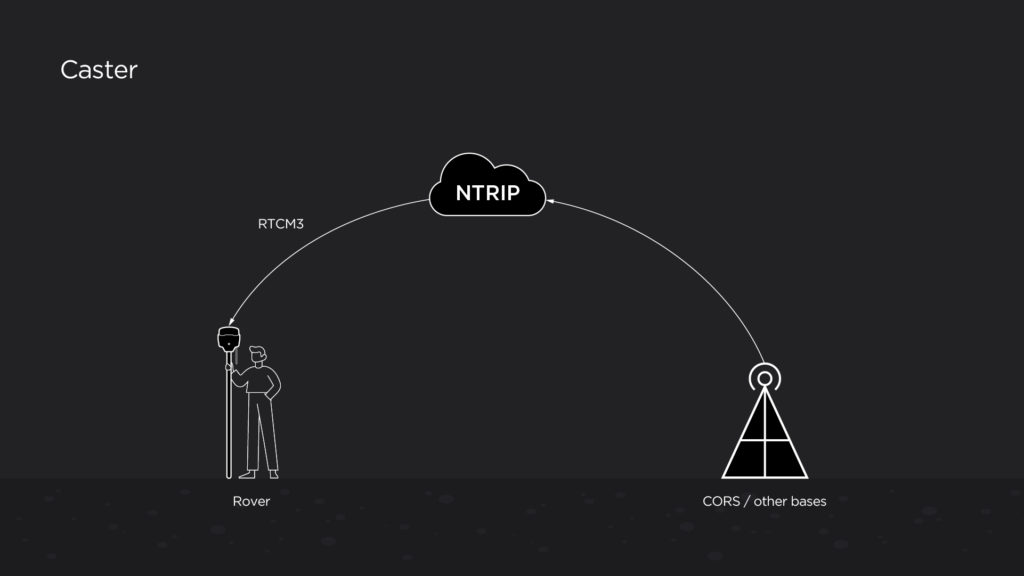
Reach RX est un GPS RTK de poche, donc pour obtenir une position précise, il a besoin de corrections via NTRIP. Généralement, vous pouvez les obtenir auprès d’un service NTRIP local. Cela fonctionne comme suit : vous entrez vos identifiants NTRIP, vous configurez le récepteur, puis vous commencez à faire des relevés. C’est très bien, mais que faire si vous n’avez pas de service NTRIP à proximité ? Existe-t-il des alternatives ?
Oui, vous pouvez placer votre propre base Reach RS2+ ou Reach RS3 et transmettre les corrections au Reach RX via le logiciel gratuit Emlid Caster, le « pipeline » qui fournit les corrections via Internet. Tout cela fonctionnera comme un service NTRIP, le vôtre.
Flux de travail
Placez votre base Reach RS3/RS2+ dans une zone avec une vue dégagée du ciel sans aucun obstacle.
Fixez la position de votre Reach RS2+ ou Reach RS3 manuellement ou en utilisant la moyenne.
Allez sur la page Emlid Caster, créez un compte, et obtenez vos identifiants NTRIP pour la base et le rover.
Configurez le Reach RS2+ ou Reach RS3 pour sortir les corrections 4 en utilisant les informations d’identification d’Emlid Caster.
Configurez Reach RX pour obtenir les corrections en utilisant les informations d’identification d’Emlid Caster.
Assurez-vous que votre Reach RX reçoit les corrections – vérifiez l’écran Status dans Emlid Flow (anciennement ReachView 3).
C’est tout ! De plus, avec Emlid Caster, vous pouvez connecter gratuitement jusqu’à 10 rovers à votre base.
Placer votre propre base peut être une véritable prise, car elle vous accompagne partout. Ainsi, vous ne dépendrez pas de l’emplacement des bases du service NTRIP et de l’abonnement en général.
Le choix d’un récepteur adapté à votre projet peut s’avérer assez difficile. La vidéo et l’article ci-dessous contiennent des conseils et des astuces qui vous aideront à prendre la bonne décision.
Votre décision d’utiliser ou non NTRIP dépend principalement de votre cas particulier et des conditions dans lesquelles vous allez travailler.
Le Reach RS2+, Reach RS3 et le Reach RX peuvent tous fonctionner avec une connexion NTRIP et recevoir les corrections via Internet. Apprenez-en plus et commandez les récepteurs Reach dans notre boutique en ligne.

Lorsque vous envisagez d’acheter un nouveau récepteur, vos objectifs et votre flux de travail sont les facteurs clés qui influencent votre décision.
Si vous avez besoin d’un rover facile à utiliser pour effectuer des relevés RTK (cinématique en temps réel) sur des sites disposant d’un accès à Internet, Reach RX est le choix qu’il vous faut. Il est compact et léger, ce qui vous permet de l’emmener partout avec vous.
Reach RX fonctionne avec n’importe quel réseau de correction (NTRIP). Associé à l’application ReachView 3, il convient aux zones disposant d’une couverture cellulaire. ReachView 3 utilise la connexion Internet de votre téléphone ou de votre tablette pour accéder aux corrections NTRIP et les envoyer à Reach RX via Bluetooth. Avec Reach RX, vous pouvez obtenir des données précises en mode RTK sur votre site d’arpentage, et vous pouvez les exporter pour une utilisation ultérieure dans un logiciel de CAO ou de SIG. Aucun post-traitement n’est nécessaire.
Reach RS2+ est un récepteur à part entière qui s’applique à d’autres types de travaux. Choisissez Reach RS2+ si vous effectuez des levés dans des zones dépourvues d’Internet et de différentes techniques, notamment RTK, PPK (Post-processed kinematic) et PPP (Precise point positioning).
Si vous préférez le PPK, Reach RS2+ ou Reach RS3 vous permet d’enregistrer les données RINEX pour un post-traitement ultérieur. Vous pouvez également utiliser les enregistrements RINEX avec OPUS, AUSPOS et les services PPP les plus courants. Pour un levé RTK dans un endroit bénéficiant d’une couverture cellulaire, utilisez Reach RS2+ ou Reach RS3 avec leur modem LTE intégré pour établir une connexion via NTRIP. Lorsqu’il n’y a pas d’Internet sur votre chantier, vous pouvez effectuer des levés avec deux unités Reach RS2+ ou Reach RS3 connectées par radio LoRa.

La compensation de l’inclinaison basée sur l’IMU du Reach RS3 vous permet d’effectuer des mesures jusqu’à 60 degrés d’inclinaison tout en conservant une précision de 20 mm.
Reach RS3 mesure et corrige continuellement l’inclinaison en temps réel pour que vous restiez sur la bonne voie.
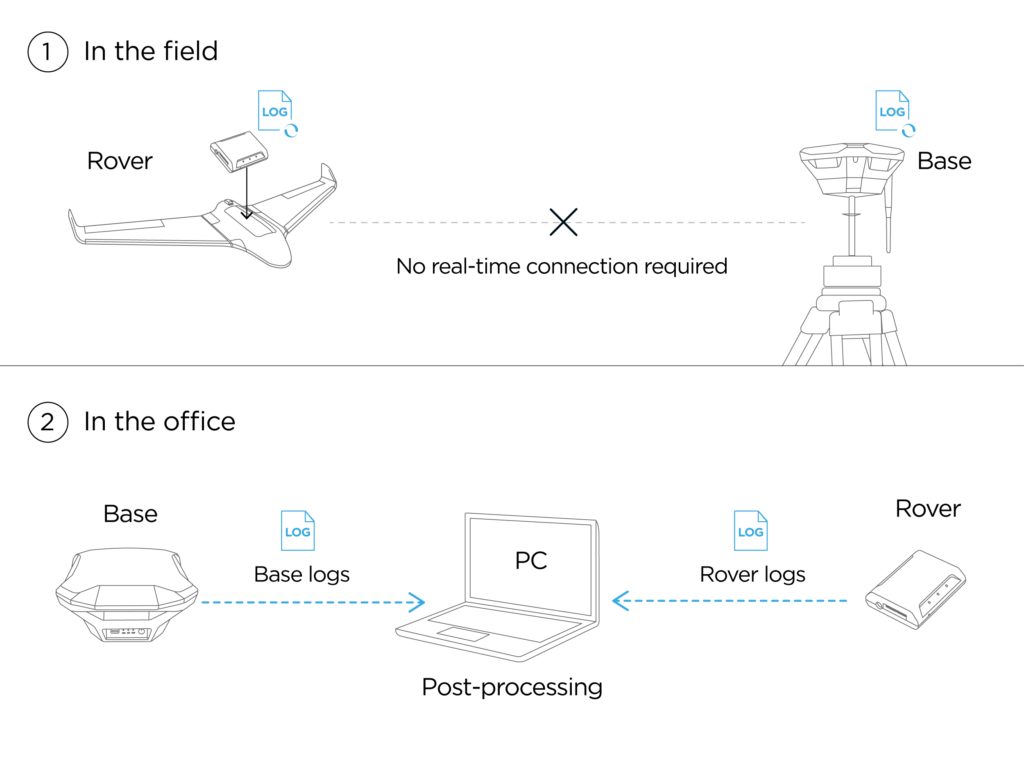
Post Process Kinematic, La cinématique post-traitement (PPK) est une technique alternative à la cinématique en temps réel (RTK). Avec le flux de travail PPK, le positionnement précis ne se fait pas en temps réel, tous les algorithmes sont appliqués après coup. La base au sol et le rover (généralement sur un drone) enregistrent des données GNSS brutes, qui sont ensuite traitées pour obtenir une trajectoire de positionnement précise.